Media Summary: Objectives: Recall the procedure of how to create 3D objects using the modelling tab. Import an Objectives: Create a flow diagram to visualize the motion path for the arm Implement this flow diagram using move instructions ... Objectives: Outline the method of adding the defined input and output signals to the virtual controller Use the built-in I/O ...
Advanced Robotstudio Pick Place Tutorial - Detailed Analysis & Overview
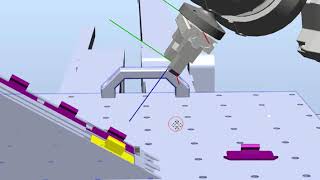
Objectives: Recall the procedure of how to create 3D objects using the modelling tab. Import an Objectives: Create a flow diagram to visualize the motion path for the arm Implement this flow diagram using move instructions ... Objectives: Outline the method of adding the defined input and output signals to the virtual controller Use the built-in I/O ... Objectives Outline the use of Smart Components and Station Logic to simulate physical behaviours Implement various Smart ... ABB Robot IRB pick and place tutorial Robot Studio With Wizard anyone can program a cobot and get a task done easily. Watch how a simple
In this video, I demonstrated a full cycle of