Media Summary: Check out the other videos in the series: Part 1 ... We explore the concept of control in robotics, notably In this interactive animated video we will explain what is the
Introduction To Linear Quadratic Regulator - Detailed Analysis & Overview
Check out the other videos in the series: Part 1 ... We explore the concept of control in robotics, notably In this interactive animated video we will explain what is the Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the This video describes the core component of optimal control, developing the optimization algorithm for In this video, we derive the optimal controller that solves the
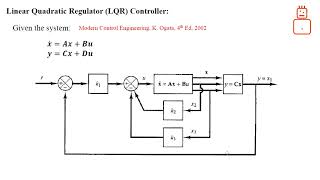
This Tech Talk looks at an optimal controller called This lecture combines the optimal full-state feedback (e.g.,



![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](https://i.ytimg.com/vi/1_UobILf3cc/mqdefault.jpg)