Media Summary: Starvation and deadlock are two common bugs that can occur in concurrent programming. Starvation happens when one one or ... Priority inversion is a nasty concurrency bug that occurs when a low priority thread prevents a high priority thread from running. นางสาวพรรณธิพร เพียชิน ECP3R 63332210316-7.
Introduction To Rtos Part 10 - Detailed Analysis & Overview
Starvation and deadlock are two common bugs that can occur in concurrent programming. Starvation happens when one one or ... Priority inversion is a nasty concurrency bug that occurs when a low priority thread prevents a high priority thread from running. นางสาวพรรณธิพร เพียชิน ECP3R 63332210316-7. A queue is a first-in, first-out (FIFO) system that is used to store and pass information between tasks in an A mutex, short for MUTual EXclusion, is a locking mechanism that is used to prevent other threads from interrupting or overwriting ... Memory management is important in a multi-threaded environment, as threads (or tasks) can quickly consume all of the allocated ...
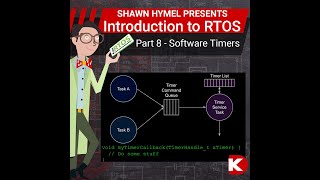
Hardware interrupts are important in many embedded systems. They allow us to respond to external events (such as a button ... In embedded systems, timers offer the ability to delay a call to a function, periodically call a function, or control some peripheral ... Learn how to use CMSIS_OS based on FreeRTOS operating system in your application Intention of this training is to