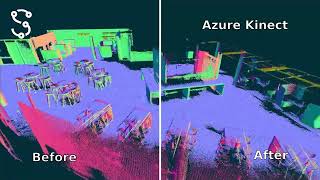
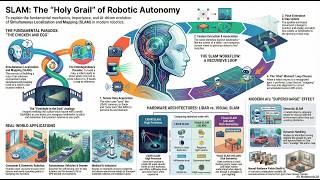
Media Summary: Demonstrating Spectacular AI SDK 1.4 and the The explainer explores Simultaneous Localization and Mapping ( Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ...
New Slam Postprocessing For Large - Detailed Analysis & Overview
Demonstrating Spectacular AI SDK 1.4 and the The explainer explores Simultaneous Localization and Mapping ( Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ... Connect with me at: GitHub: Website: Twitter: This is a walkthrough of all the steps involved in In this AI Research Roundup episode, Alex discusses the paper: 'VGGT-
Jochen Sprickerhof, Andreas Nüchter, Kai Lingemann, and Joachim Hertzberg. A Heuristic Loop Closing Technique for ... J. Song, J. Wang, L. Zhao, S. Huang, G. Dissanayake, “MIS- blacksstopkillingblackschallenge_360 Neural implicit representations have recently ... By Andrew Davison, Yolanda Gonzalez Cid, Nobuyuki Kita, IAV 2004.