Media Summary: Petoi's Bittle Toy Robot Walking Gaits in Simulation and Real Life using For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: Jan Ole von Hartz, Tim Welschehold, Abhinav Valada, and Joschka Boedecker The Art of
Rlif Interactive Imitation Learning As - Detailed Analysis & Overview
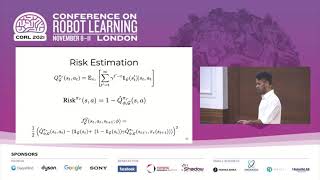
Petoi's Bittle Toy Robot Walking Gaits in Simulation and Real Life using For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: Jan Ole von Hartz, Tim Welschehold, Abhinav Valada, and Joschka Boedecker The Art of In this AI Research Roundup episode, Alex discusses the paper: 'RubricEM: Meta-RL with Rubric-guided Policy Decomposition ... The slides associated with this video are accessible on the course web: ... Task-Relevant Adversarial Imitation Learning
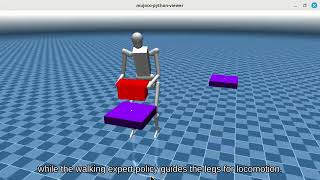
Expert-Guided Imitation for Learning Humanoid Loco-Manipulation from Motion Capture