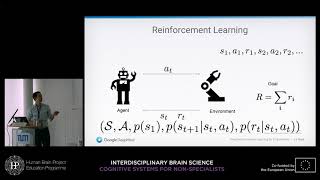
Media Summary: Sandeep Chinchali Stanford University January 10, 2020 Today's To help make training more accessible, a team of researchers from NVIDIA and Carnegie Mellon University developed a ... HBP Curriculum: Interdisciplinary Brain Science Cognitive systems for non-specialists 4th Teaching Cycle Lecture 5:
Robot Control With Distributed Deep - Detailed Analysis & Overview
Sandeep Chinchali Stanford University January 10, 2020 Today's To help make training more accessible, a team of researchers from NVIDIA and Carnegie Mellon University developed a ... HBP Curriculum: Interdisciplinary Brain Science Cognitive systems for non-specialists 4th Teaching Cycle Lecture 5: Want to learn industrial automation? Go here: ▷ Want to train your team in industrial automation? Go here: ... Supplementary video for our IROS 2018 paper. IMPERA Abschlussdemonstration Verteilte Systeme der Universität Kassel Roboter exploriert einen unbekannten Bereich.