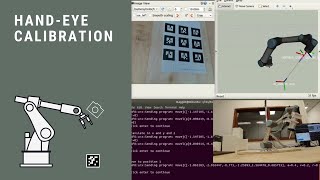
Media Summary: MoveIt Calibration is a new tool built on top of MoveIt for extrinsic To use 3D sensor data in an integrated scene together with a robot its position relative to the robots position is needed ( Thanks to Institut Maupertuis! Resources:
Ros Eye Hand Camera Calibration - Detailed Analysis & Overview
MoveIt Calibration is a new tool built on top of MoveIt for extrinsic To use 3D sensor data in an integrated scene together with a robot its position relative to the robots position is needed ( Thanks to Institut Maupertuis! Resources: Roboception rc_visard 3D camera and UR5 robot arm hand-eye calibration