Media Summary: A Smooth Representation of Belief over SO(3) for Deep Rotation Learning with Uncertainty** Valentin Peretroukhin (University of ... MPTC – Modular Passive Tracking Controller for stack of tasks based control frameworks** Johannes Englsberger (German ... 3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans** Antoni Rosinol (MIT)*; Arjun Gupta ...
Rss 2020 Spotlight Talk 7 - Detailed Analysis & Overview
A Smooth Representation of Belief over SO(3) for Deep Rotation Learning with Uncertainty** Valentin Peretroukhin (University of ... MPTC – Modular Passive Tracking Controller for stack of tasks based control frameworks** Johannes Englsberger (German ... 3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans** Antoni Rosinol (MIT)*; Arjun Gupta ... Explaining Multi-stage Tasks by Learning Temporal Logic Formulas from Suboptimal Demonstrations** Glen Chou (University of ... Event-Driven Visual-Tactile Sensing and Learning for Robots** Tasbolat Taunyazov (National University of Singapore); Weicong ... Deep Drone Acrobatics** Elia Kaufmann (ETH / University of Zurich)*; Antonio Loquercio (ETH / University of Zurich); Rene Ranftl ...
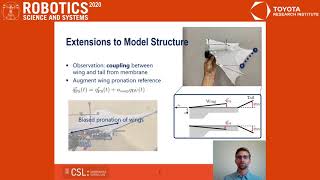
Optimally Guarding Perimeters and Regions with Mobile Range Sensors** Siwei Feng (Rutgers University)*; Jingjin Yu (Rutgers ... Fast Risk Assessment for Autonomous Vehicles Using Learned Models of Agent Futures** Allen Wang (MIT)*; Xin Huang (MIT); ... NH-TTC: A gradient-based framework for generalized anticipatory collision avoidance** Bobby Davis (University of Minnesota ... Nonparametric Motion Retargeting for Humanoid Robots on Shared Latent Space** Sungjoon Choi (Disney Research)*; Matthew ... Kernel Taylor-Based Value Function Approximation for Continuous-State Markov Decision Processes** Junhong Xu (INDIANA ... Data-driven modeling of a flapping bat robot with a single flexible wing surface** Jonathan Hoff (University of Illinois at ...
Eyes-Closed Safety Kernels: Safety of Autonomous Systems Under Loss of Observability** Forrest Laine (UC Berkeley)*; ...