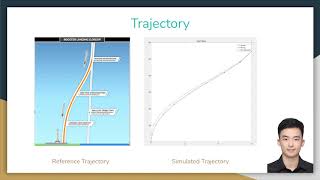
Media Summary: This is the video for the final project of ME 231A: Experimential Advanced Control Design I offered during the Fall 2019 semester ... Supplemental video to our paper published at IEEE Robotics and Automation Letters on Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing
Trajectory Optimization With Model Predictive - Detailed Analysis & Overview
This is the video for the final project of ME 231A: Experimential Advanced Control Design I offered during the Fall 2019 semester ... Supplemental video to our paper published at IEEE Robotics and Automation Letters on Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing Full paper and additional information available at Publication: " ... torque we can actually get out of this so this is a front flip from ground with Video accompanying the paper "Learning a Generalizable
Paper: Code and more: Abstract - Robots must make and break contact to ... March 10, 2026 Instructor: Dr. Christian Hubicki Applied Optimal Control EML 4930/5930-0001.