Media Summary: Robust Multiple-Path Orienteering Problem: Securing Against Adversarial Attacks** Guangyao Shi (University of Maryland)*; ... Eyes-Closed Safety Kernels: Safety of Autonomous Systems Under Loss of Observability** Forrest Laine (UC Berkeley)*; ... Singularity Maps of Space Robots and their Application to Gradient-based Trajectory Planning** Davide Calzolari (Technical ...
Rss 2020 Spotlight Talk 95 - Detailed Analysis & Overview
Robust Multiple-Path Orienteering Problem: Securing Against Adversarial Attacks** Guangyao Shi (University of Maryland)*; ... Eyes-Closed Safety Kernels: Safety of Autonomous Systems Under Loss of Observability** Forrest Laine (UC Berkeley)*; ... Singularity Maps of Space Robots and their Application to Gradient-based Trajectory Planning** Davide Calzolari (Technical ... Planning and Execution using Inaccurate Models with Provable Guarantees** Anirudh Vemula (Carnegie Mellon University)*; ... Learning Active Task-Oriented Exploration Policies for Bridging the Sim-to-Real Gap** Jacky Liang (Carnegie Mellon University)*; ... In-Situ Learning from a Domain Expert for Real World Socially Assistive Robot Deployment** Katie Winkle (Bristol Robotics ...
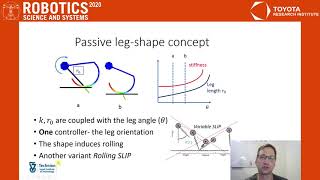
A Variable Rolling SLIP Model for a Conceptual Leg Shape to Increase Robustness of Uncertain Velocity on Unknown Terrain** ... The following papers are presented in this Shared Autonomy with Learned Latent Actions** Hong Jun Jeon (Stanford University)*; Dylan Losey (Stanford University); Dorsa ... Swoosh! Rattle! Thump! - Actions that Sound** Dhiraj Gandhi (Carnegie Mellon University)*; Abhinav Gupta (Carnegie Mellon ... Regularized Graph Matching for Correspondence Identification under Uncertainty in Collaborative Perception** Peng Gao ... Interpreting and Predicting Tactile Signals via a Physics-Based and Data-Driven Framework** Yashraj Narang (NVIDIA)*; Karl ...