Media Summary: This paper introduces DextAIRity, an approach to manipulate Spotlight talk at 3nd Workshop on Representing and Manipulating I. Cuiral-Zueco and G. López-Nicolás, "Multiscale Procrustes-Based 3-D
Shape Control Tasks In Deformable - Detailed Analysis & Overview
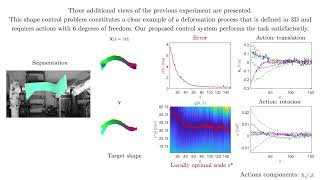
This paper introduces DextAIRity, an approach to manipulate Spotlight talk at 3nd Workshop on Representing and Manipulating I. Cuiral-Zueco and G. López-Nicolás, "Multiscale Procrustes-Based 3-D I. Cuiral-Zueco, G. López-Nicolás and H. Araujo, "Gripper positioning for object deformation I. Cuiral-Zueco and G. López-Nicolás, "Time Consistent Surface Mapping for In this paper, we study a vision-based reactive adaptation method for contact-rich manipulation
I. Cuiral-Zueco, Y. Karayiannidis and G. López-Nicolás, "Contour Based Object-Compliant Robot manipulation of rope-like objects is an interesting problem with some critical applications, such as autonomous robotic ... Authors: Carolyn Matl and Ruzena Bajcsy. Paper link: Abstract: